CleanThatMessUp
This repo was used to support our idea for the NASA Space Apps Challenge 2019.
![]()
Dataset
The dataset used is the gdp_interpolated_drifter, offered by the NOAA agency. The project uses a restricted version of the dataset in which only end coordinates and ID have been used. The dataset is used in the article Garbage Patch Visualization Experiment from NASA.
Install
pip3 install -r requirements.txt
mkdir data img
wget -O ./data/small.csv http://osmc.noaa.gov/erddap/tabledap/gdp_interpolated_drifter.csv?ID%2Celat%2Celon&distinct()
Run
python3 compute_coast_dist.py
python3 plot_coast.py
Results

Project Ninfea
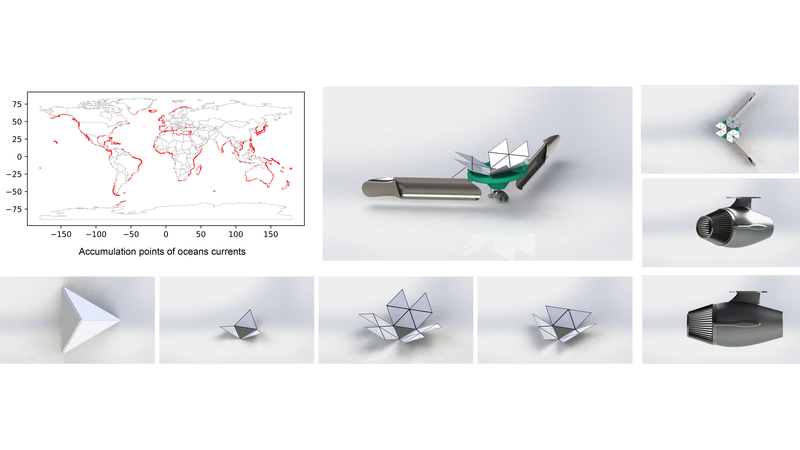
We aim to filter water and collect the micro-plastic near the coasts to mitigate the micro-plastic problem. Our project proposes to build an autonomus GPS based robot powered by renewable energy that works in bounded areas.
THE PROBLEM A great amount of plastic is focusing on the coast, that is causing an artificial island that is disintegrating into micro-plastic. The micro-plastic is being eaten by planktons, thus enterning food chain.
OUR SOLUTION Analyzing NASA and NOAA Data we discovered the main accumulation point of ocean currents which we hypotize to be an accumulation point for plastic trash. We have designed a solution to filter water and collect the micro-plastic where the plastic accumulates. Our project proposes to build an autonomus GPS based robot waterlily shaped powered by renewable energy that works in bounded areas.
IMPLEMENTATION Project Ninfea, the name of our solution, is a filtering system that use films to trigger an inducted crossflow which grants self-cleaning and the redirection of accumulated debris. The system is powered by a outboard hydrojet naval engine, designed by an italian startup, which it has a filter that allow to filter large water flow rates. There also other filters disposed Project Ninfea which allows to filter the micro-plastic above the sea surface and they grant to cover a wide area.
The robots work during night and day and they recharge through the morning solar energy and also the wave motion.
REFERENCES
- OSMC - NOAA: https://bit.ly/2N1hZ7E
- NASA SVS Garbage Patch: https://go.nasa.gov/2O7tyJM
- Open Street Map: https://www.openstreetmap.org
SLIDES (IN ITALIAN)
- Google Slides
- PDF (without gifs)
- Video Rendering